Stars as quantum light sources#
Chapter opening
Stars are natural first targets for quantum astronomy. Their photospheric continua are close to thermal light, bright stars provide high photon rates, and their angular diameters are often in the milliarcsecond range. Intensity interferometry can measure \(|V|^2\) directly without keeping optical phase coherence between telescopes. A stellar surface, however, is not a perfect disk. Limb darkening, rapid rotation, spots, binaries, pulsation, and winds all write the surface-brightness distribution into the visibility curve. The coherence functions, event tables, and Fisher information developed earlier become measurements of stellar radius, effective temperature, rotation, and distance scale [Abeysekara et al., 2020, Abe et al., 2024, Brown and Twiss, 1956, Hanbury Brown, 1974, Hanbury Brown et al., 1967, Hanbury Brown et al., 1974, Hanbury Brown et al., 1967].
Starlight and the intensity-interferometry observable#
A stellar photosphere in local thermodynamic equilibrium emits approximately thermal radiation. One coherent thermal mode has \(g^{(2)}(0)=2\), but a real stellar observation mixes many spatial, polarization, frequency, and time modes, so the visible \(g^{(2)}(0)-1\) is small. A photon-counting intensity interferometry experiment on Vega measured \(\langle g^{(2)}\rangle=1.0034\pm0.0008\) at zero baseline and found no significant correlation on a baseline of about \(2~\mathrm{km}\), consistent with Vega’s angular diameter of about \(3.3~\mathrm{mas}\) [Zampieri et al., 2021]. This is the mode-dilution argument of Chapter The quantum language of astrophysical radiation mechanisms in a stellar setting.
Intensity interferometry measures the correlation between intensity fluctuations at two telescopes. For thermal light, the calibrated zero-delay correlation and the complex visibility obey
\(\gamma_{ij}\) is the complex degree of coherence between the two telescopes, and \((u,v)={\bf B}_\perp/\lambda\) is the projected baseline divided by wavelength, measured in wavelengths. The left-hand side is estimated from a delay histogram, time-shift background subtraction, and normalized correlation. The right-hand side is the squared modulus of the Fourier transform of the sky brightness. The missing phase makes \(|V|^2\) insensitive to mirror flips and global translations, but angular diameters, axial ratios, binary separations, and some symmetric structures can still be measured accurately.
Baseline and angular scale are tied by the same ratio:
A \(1~\mathrm{mas}\) star begins to be resolved on roughly hundred-meter baselines in visible light. A \(0.1~\mathrm{mas}\) surface structure requires kilometer-scale baselines. The Narrabri Stellar Intensity Interferometer used \(10\)–\(188~\mathrm{m}\) baselines and two \(6.7~\mathrm{m}\) reflectors to measure angular diameters for 32 bright stars. Modern VERITAS, MAGIC, and future CTA-like arrays reopen this parameter space with \(>10~\mathrm{m}\)-class Cherenkov telescopes, large collecting area, and digital correlators [Abeysekara et al., 2020, Abe et al., 2024, Dravins et al., 2012, Hanbury Brown et al., 1974].
The intensity-interferometry signal-to-noise scaling was given in Eq. (98). For stellar samples, its meaning is simple. Higher photon rate, broader electronic bandwidth, and longer integration reduce the error on \(|V|^2\). Background, dead time, finite time resolution, and systematic covariance decide where that statistical improvement stops. The first practical samples therefore favor stars that are bright, hot, blue, and resolvable on hundred-meter baselines [Abeysekara et al., 2020, Rou et al., 2013].
Angular diameter, effective temperature, and the uniform disk#
The basic stellar model is still the uniform disk of Chapter Spatial coherence and intensity interferometry, using Eq. (93). Here \(B\) is projected baseline, \(\lambda\) is the effective wavelength, and \(\theta\) is in radians. An angular diameter given in mas must be multiplied by \(4.848\times10^{-9}\) before it is used in the equation. Intensity interferometry fits \(|V_{\rm UD}|^2\); the complex phase has already been replaced by a squared modulus. The first null is where the diameter sensitivity is high, but if \(|V|^2\) is too low, background and systematics become important. A real observation should cover short, intermediate, and long baselines.
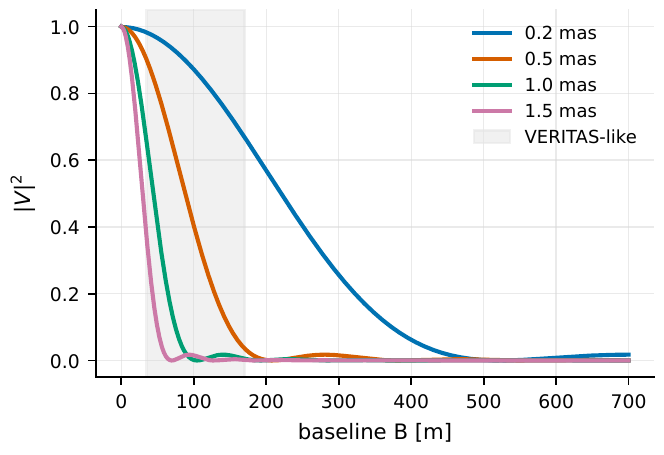
Figure 55 Squared visibility of a uniform-disk star as a function of baseline. The wavelength is 416 nm, close to the VERITAS SII band. Larger angular diameters make the visibility fall faster. The gray region marks projected baselines of order 35–170 m, comparable to VERITAS, which are well suited to bright stars with angular diameters near 0.5–1.5 mas.#
Angular diameter plus total radiative flux gives the effective temperature. If \(F_{\rm bol}\) is the bolometric flux measured at Earth, in \(\mathrm{W\,m^{-2}}\), then
\(\theta_{\rm LD}\) is the limb-darkened angular diameter, and \(\sigma_{\rm SB}\) is the Stefan–Boltzmann constant. Error propagation gives
The angular-diameter error enters with coefficient \(1/2\), and often dominates the error on \(T_{\rm eff}\). VERITAS SII observations of \(\beta\) UMa found \(\theta_{\rm LD}=1.07\pm0.04{\rm(stat)}\pm0.05{\rm(sys)}~\mathrm{mas}\), which gave \(T_{\rm eff}\simeq9700\pm200\pm200~\mathrm{K}\) and helped constrain the age of the Ursa Major moving group [Acharyya et al., 2024].
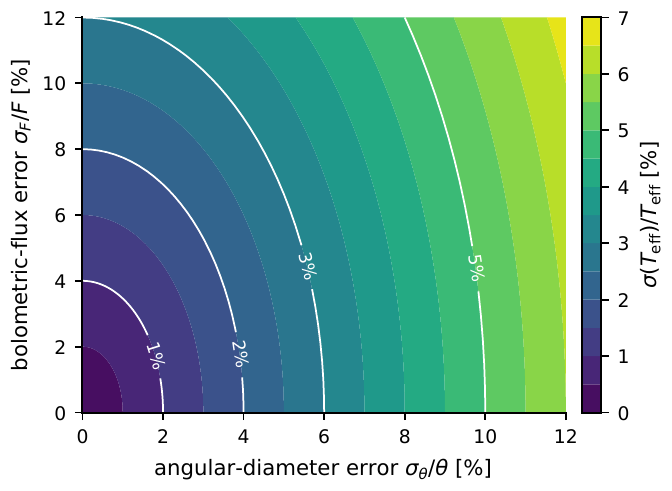
Figure 56 Error propagation from \(F_{\rm bol}\) and \(\theta_{\rm LD}\) to \(T_{\rm eff}\). The horizontal axis is the fractional angular-diameter error, the vertical axis is the fractional bolometric-flux error, and the color gives the fractional effective-temperature error. Because \(T_{\rm eff}\propto F_{\rm bol}^{1/4}\theta^{-1/2}\), angular-diameter errors usually matter more than flux errors of the same percentage.#
If the distance \(d\) is known, the radius and luminosity are
Gaia parallaxes, interferometric angular diameters, and \(F_{\rm bol}\) place a star on the HR diagram with a covariance region. Comparing that region with evolutionary tracks constrains mass, age, mixing length, overshoot, rotation, and other model choices. Infrared flux methods, Mark III and CHARA amplitude interferometry, and SII angular diameters are complementary distance and radius scales [Blackwell and Lynas-Gray, 1994, Blackwell and Shallis, 1977, Mozurkewich et al., 2003, Mozurkewich et al., 1991, Ramírez and Meléndez, 2005].
Limb darkening and stellar atmospheres#
Real stellar disks are darker near the limb because each line of sight samples a different temperature layer. The simplest linear limb-darkening law is
\(r\) is the projected disk radius divided by the stellar radius, \(\mu\) is the cosine of the angle between the surface normal and the line of sight, and \(u_\lambda\) is the wavelength-dependent limb-darkening coefficient. Hot stars in the blue, cool giants in molecular bands, and Mira variables at different phases all have different \(I(\mu)\). Modern analyses usually generate a synthetic intensity profile from atmosphere models or a limb-darkening toolkit, then compute the visibility. A linear \(u_\lambda\) is better used for order-of-magnitude estimates [Diaz-Cordoves and Gimenez, 1992, Hanbury Brown et al., 1974, Hestroffer, 1997, Parviainen and Aigrain, 2015].
For an axisymmetric brightness profile, the visibility is a radial Hankel transform,
\(J_0\) is the zeroth-order Bessel function. A uniform disk is the special case \(I(r)=\) constant, which returns Eq. (93). Limb darkening shifts the nulls and changes sidelobe heights. The same \(|V|^2\) data therefore give a uniform-disk diameter \(\theta_{\rm UD}\) if fitted with a uniform disk, and a more physical \(\theta_{\rm LD}\) if fitted with an atmosphere model. The Narrabri angular-diameter catalog already required this conversion from uniform-disk to limb-darkened diameters [Hanbury Brown et al., 1974, Hanbury Brown et al., 1974].
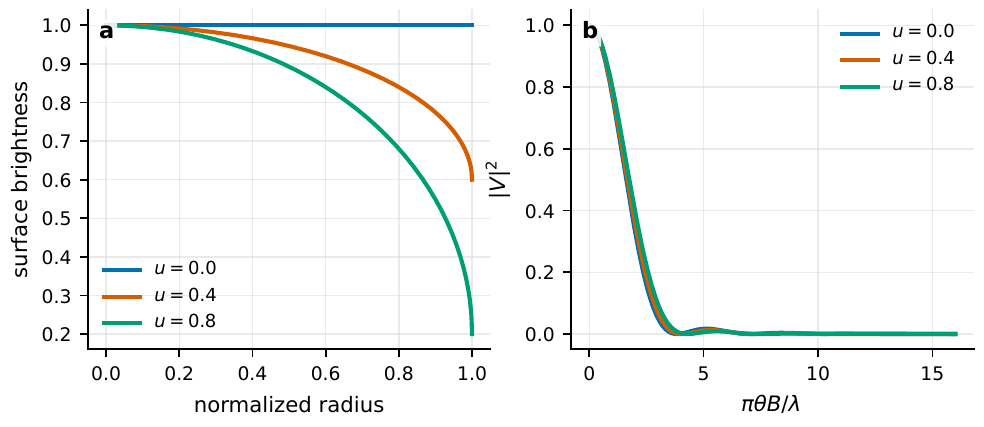
Figure 57 Effect of linear limb darkening on surface brightness and visibility. The left panel shows radial brightness profiles for uλ = 0, 0.4, 0.8. The right panel shows |V|2 computed by numerical integration of Eq. (173). Stronger limb darkening softens the disk edge, so the visibility nulls and sidelobes move.#
Limb darkening is also a source of systematic error. For hot stars, \(u_\lambda\) depends on \(T_{\rm eff}\), \(\log g\), metallicity, microturbulence, and filter profile. For cool giants and Miras, the radius changes with wavelength because molecular layers contribute different opacity in different bands. If a star is used as a calibrator, its singleness, rotation, companions, infrared excess, and variability all need to be checked. For SII, the total calibration error combines the catalog angular diameter, correlator gain, timing synchronization, background light, and \(|V|^2\) covariance.
Rapid rotation, binaries, and surface structure#
Rapid rotation makes a photosphere oblate and changes the surface temperature through gravity darkening. If the projected photosphere is approximated by an ellipse, the effective angular diameter along baseline position angle \(\psi\) can be written as
\(\theta_{\rm maj}\) and \(\theta_{\rm min}\) are the projected major- and minor-axis angular diameters. Baselines at different position angles see different \(|V|^2\) slopes. VERITAS SII observations of \(\gamma\) Cassiopeiae at \(416~\mathrm{nm}\) found a minor-axis angular diameter of \(0.43\pm0.02~\mathrm{mas}\), a major-to-minor radius ratio of \(1.28\pm0.04\), and a position angle of \(116^\circ\pm5^\circ\). Rapidly rotating atmosphere models then gave a lower limit close to breakup speed and an equatorial radius of about \(10.9~R_\odot\) [Archer et al., 2025].
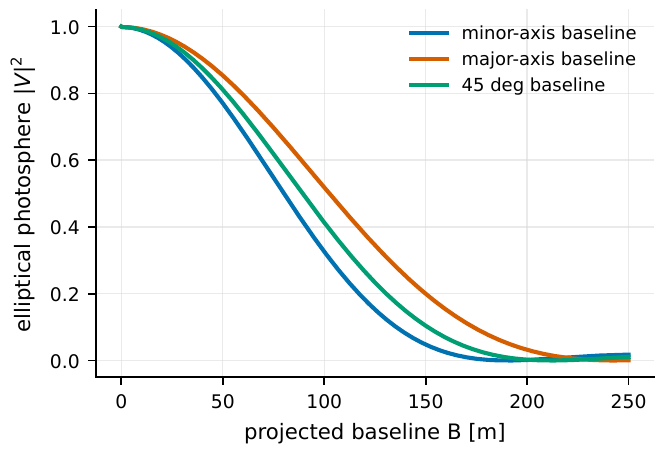
Figure 58 Squared visibility of a rapidly rotating elliptical photosphere at different baseline position angles. The model uses a γ Cas-like axial ratio of 1.28 and λ = 416 nm. The effective angular diameter depends on projected angle, so the same baseline length gives different correlation strengths. This geometric dependence allows SII to measure photospheric oblateness.#
Binaries produce oscillations in visibility space. If both stars are unresolved, their angular separation vector is \({\boldsymbol d}\), and the secondary-to- primary flux ratio is \(f\), then
\({\boldsymbol u}={\boldsymbol B}_\perp/\lambda\), and \({\boldsymbol d}\) is measured in radians. The oscillation period gives the separation projected along the baseline; the amplitude gives the flux ratio. If either star is partially resolved, each stellar disk visibility must be included. Some targets in the Narrabri catalog were later identified as binaries or multiples. Modern multibaseline SII arrays can fit binary orbit, angular diameters, and flux ratio together, then combine the result with radial velocities to obtain masses [Hanbury Brown et al., 1974, Hanbury Brown et al., 1970, Nuñez et al., 2012].
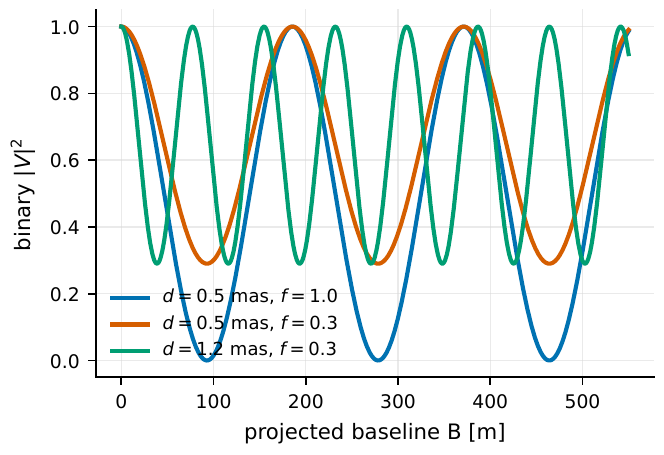
Figure 59 Squared-visibility oscillations for an unresolved binary. A larger angular separation makes the oscillation with baseline faster. A flux ratio closer to unity gives a larger oscillation amplitude. Real binaries also require the finite angular diameters of both stars, orbital position angle, and multiband flux ratios.#
Surface structure is harder than a binary because \(|V|^2\) lacks phase. Spots, convective cells, nonradial pulsations, and Be-star disks all produce non-axisymmetric signals. A single disk or binary model can fit cleanly and still be physically wrong. Multiple baselines, multiple nights, multiple wavelengths, and spectral-line channels can remove part of the degeneracy. Simulations show that Cherenkov telescope arrays may recover diameters, flattening, binary structure, and large-scale surface features because they offer many baselines and wide coverage. Complex images will still need priors or joint amplitude-interferometry data [Dravins et al., 2012, Nuñez et al., 2012, Rou et al., 2013].
Pulsating stars, winds, and spectral-line channels#
Cepheids connect angular-diameter measurements to the distance scale. Baade–Wesselink methods compare angular-radius changes with the integral of radial velocity:
\(d\) is distance, \(v_r\) is radial velocity, \(v_\gamma\) is systemic velocity, and \(p\) is the projection factor that converts observed radial velocity into true pulsation velocity. Matching the phase of the angular- diameter curve and velocity curve gives the distance. Systematics come from the \(p\) factor, limb darkening, companions, period changes, and atmospheric velocity gradients. Bright Cepheids are attractive visible-light SII targets because they are bright and their radius changes are predictable [Dravins et al., 2012, Fouque and Gieren, 1997, Fouqué et al., 2007].
Be stars and Wolf–Rayet stars separate continuum and line-emitting regions. If a narrow-band filter covers an emission line, the observed visibility is the flux-weighted sum of the continuum and line components:
If the continuum photosphere has been calibrated in nearby bands, one can infer \(V_{\rm line}\) and constrain disk radius, inclination, or wind geometry. For rapidly rotating Be stars, H\(\alpha\) traces the disk and blue continuum traces the photosphere. The \(\gamma\) Cas result shows that SII can measure photospheric oblateness directly, while infrared or H\(\alpha\) interferometry adds the disk geometry [Archer et al., 2025].
Natural lasers and stimulated spectral lines can also occur in stellar environments, especially systems such as \(\eta\) Carinae, where a strong radiation field and dense gas clumps coexist. Line intensity alone is not enough to prove stimulated emission. The test needs line width, spatial location, pumping channels, polarization, and spectral-channel \(g^{(2)}\). The natural laser diagnostics discussed in Chapter The quantum language of astrophysical radiation mechanisms become concrete target- selection criteria here [Dravins and Germanà, 2008, Johansson and Letokhov, 2004, Johansson and Letokhov, 2005].
Stars are the most stable validation field. Thermal bunching and \(|V|^2\) calibration can be checked repeatedly on bright stars. The same data structure then supports angular diameters, limb darkening, rotation, binaries, and spectral-line structure. White dwarfs and neutron stars still use arrival time, energy, polarization, and phase, but the sources are smaller and fainter, the magnetic fields are stronger, and the physics carried by photon statistics and polarization is more extreme.